
Mapping and XR environment construction
Mapping: challenges and facilitation
How to build extended reality environments? How to facilitate the mapping process?
BRIDGES project has a precise approach to mapping and 3D reconstruction of the environments, based on fiducial markers and natural features, that represent the precondition for piloting on sites.
Since mapping is the most expensive and time-intensive part of using XR, the project consortium proposes an automated solution that will make it easier, cheaper and faster to adopt extended reality technology.
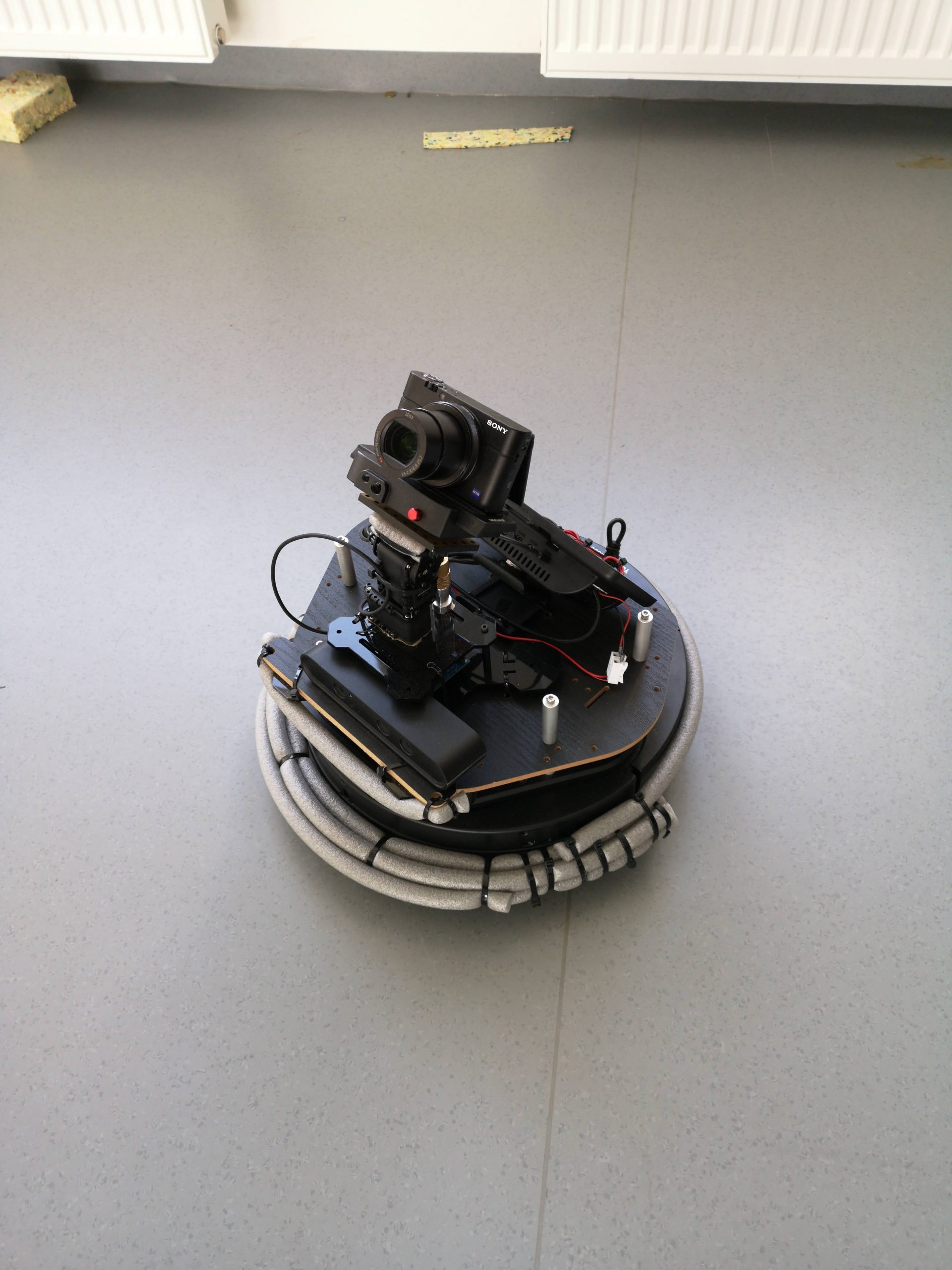
A robot operating system equipped with sensors, turret and camera will assist the mapping process of real environements. A strong robotic micro turret can orient the camera in different directions with a full control over the shooting angle and, just like the common household automation appliances. The robot will systematically explore rooms, scanning them in all three dimensions.
The proposed solution is much more reliable than drones and aerial view in mapping rooms because ground vehicles can better map the ceilings (a need for extended reality applications in indoor environments), they can rely on wheel odometry for navigation on flat surfaces and they do not depend on GPS data (as drones do).
Additionally, the low power consumption of the robot allows it to conduct the whole operation for hundreds square metres of exploration, while taking thousands of images.
Mapping in BRIDGES project
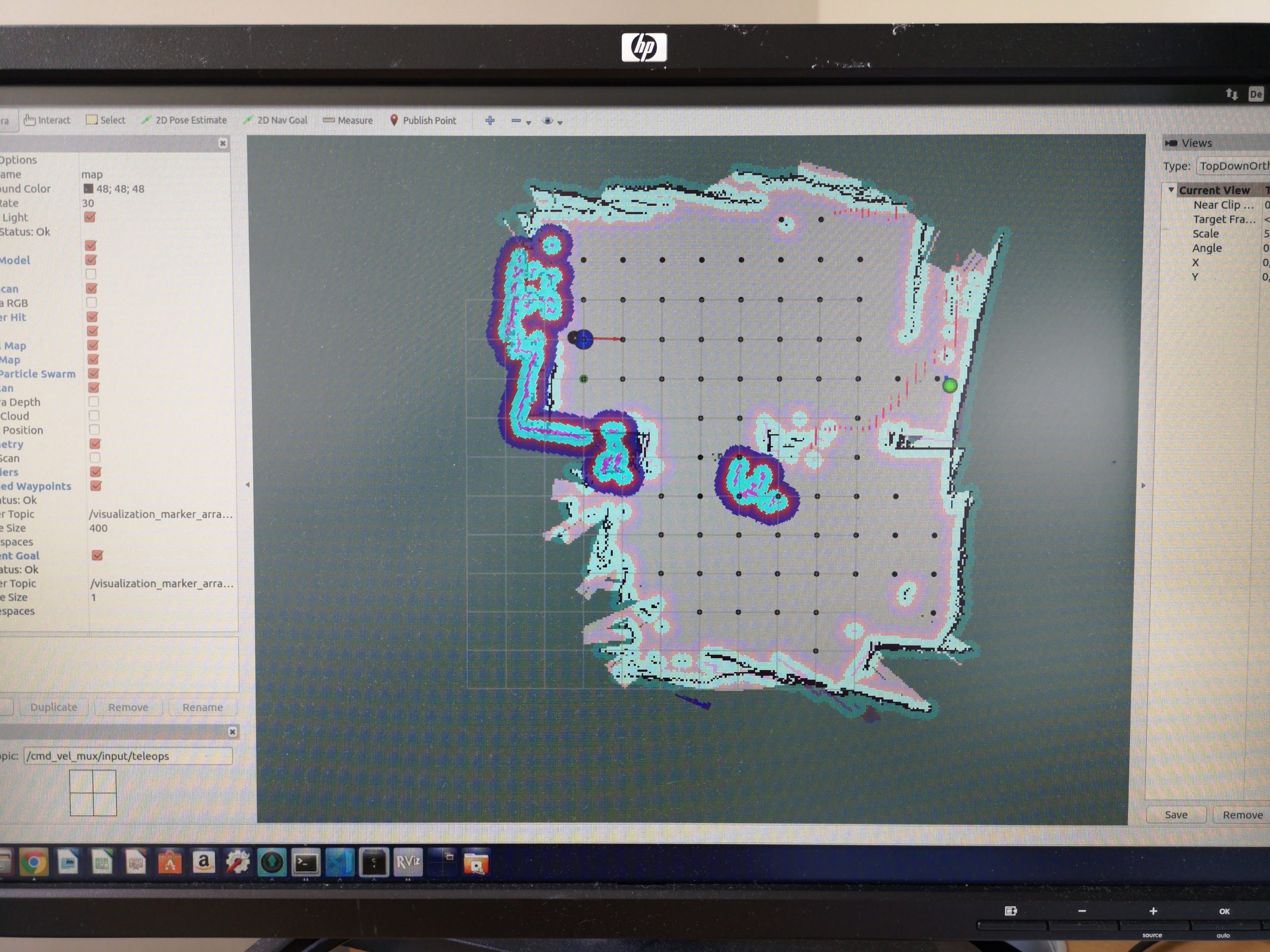
For the project activities, taking into account the restrictions in traveling due to Covid-19, this solution provides the partners of pilot sites with an easy-to-use. It’s enough to put it on site and to press “start”: the robot will start the autonomous exploration – by using Simultaneous Localization and Mapping (SLAM) and extra localization using Adaptive Monte Carlo Localization (AMCL) based on based on LiDAR and RGBD sensors for collision avoidance – and it autonomously records images – by using photogrammetry software (Reality Capture) for 3D reconstruction with customized software modules to retrieve marker positions and maps.
Human intervention – such as pausing, stopping and resuming the operations – is allowed by on-board buttons or remotely by a remote PC.
Additionally, it’s possible to extend its functionalities by utilising the unlimited power of ROS and ROS packages.
What’s more? Let’s see the results, soon available the explorations in our pilot activities for airports training activities and museum visits.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}